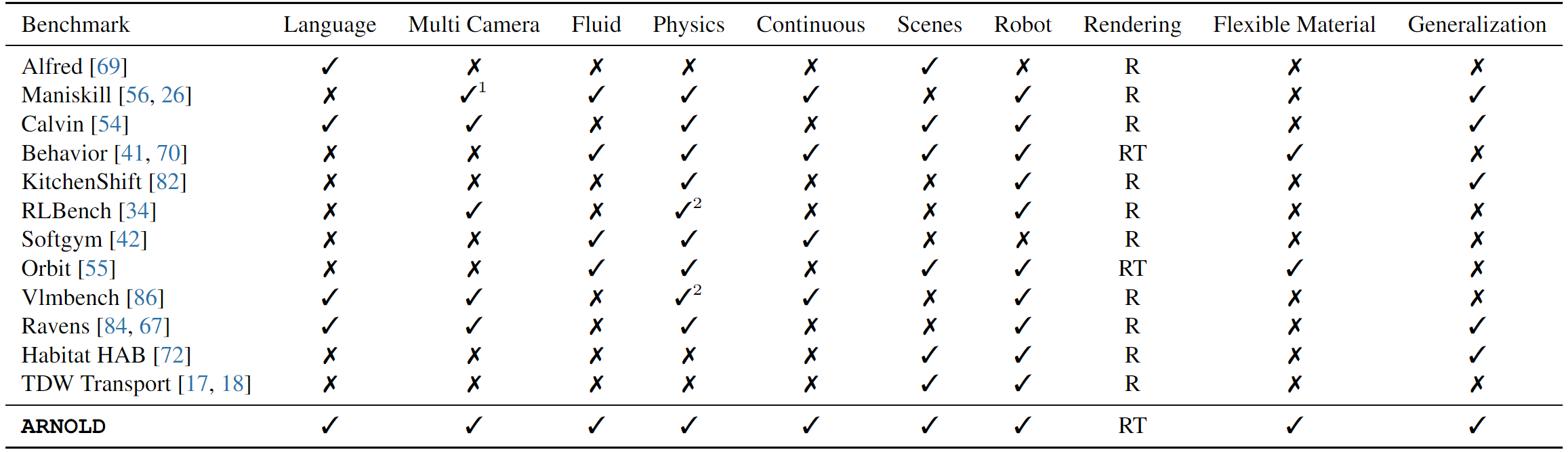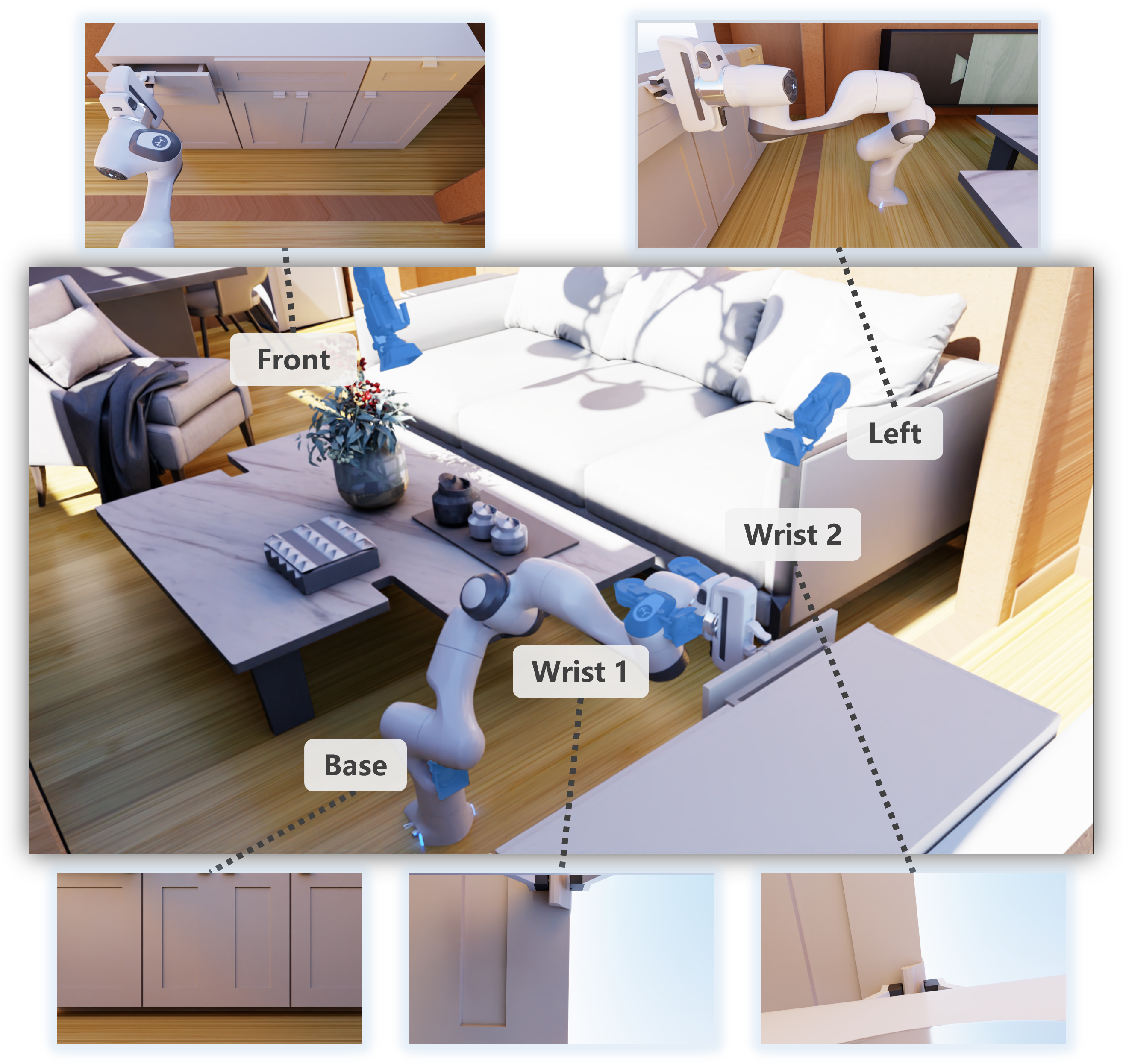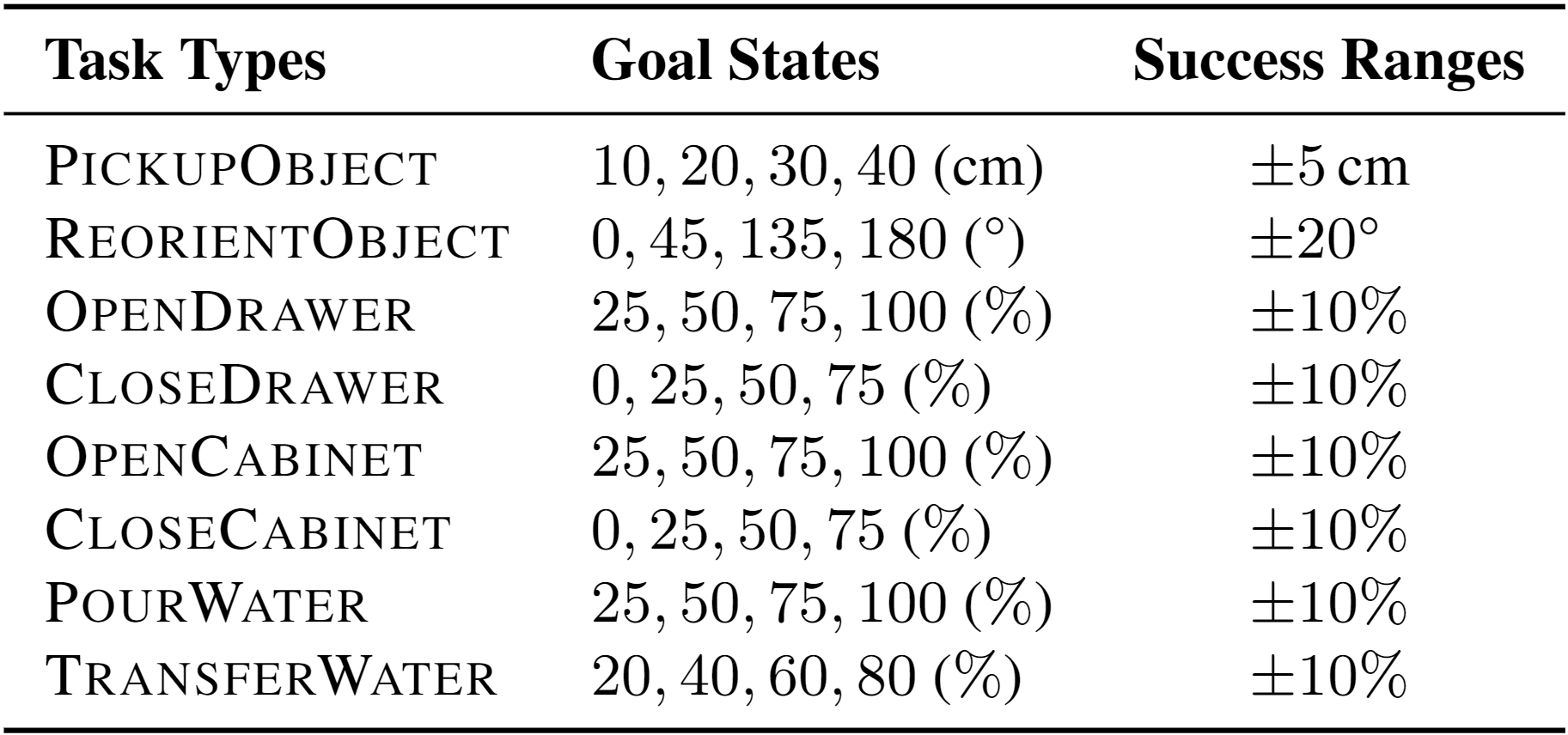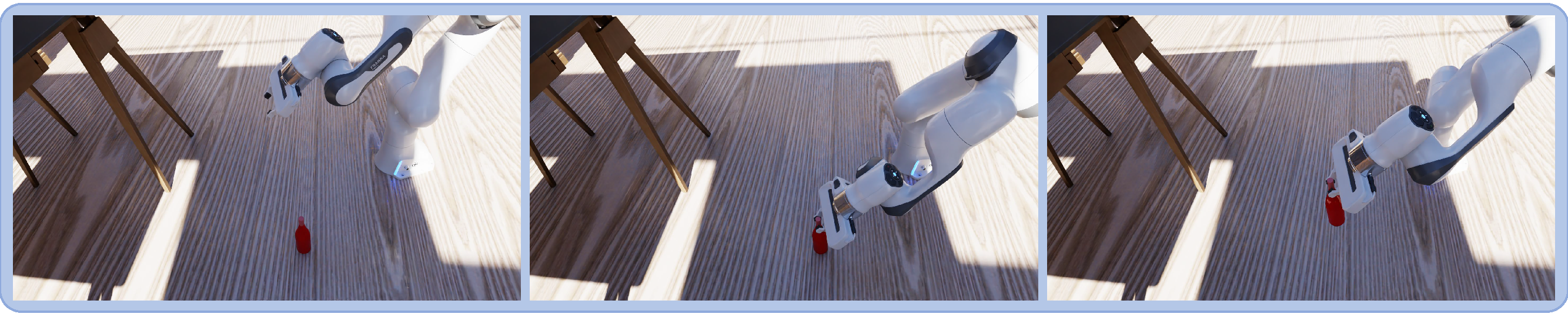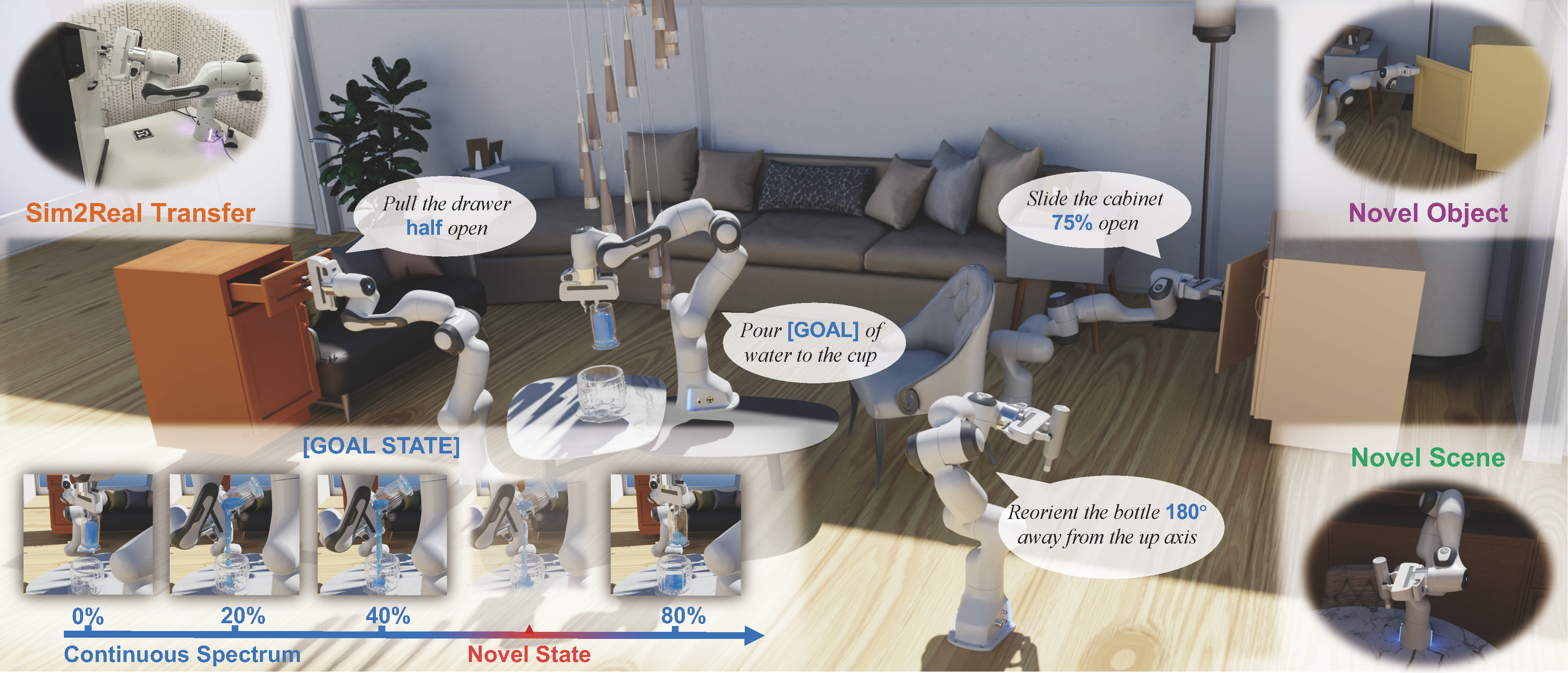
We present ARNOLD, a benchmark that evaluates language-grounded task learning with continuous states in realistic 3D scenes. ARNOLD provides 8 tasks with their demonstrations for learning and a testbed for the generalization abilities of agents over (1) novel goal states, (2) novel objects, and (3) novel scenes.